Pues jugando un poco con Arduino y Asterisk, se me ocurrió hacer una interface entre estos dos para activar luces, puertas, etc. utilizando una extensión telefónica.
También hice un sistema de sockets para que desde una página web se pudieran activar estos eventos.
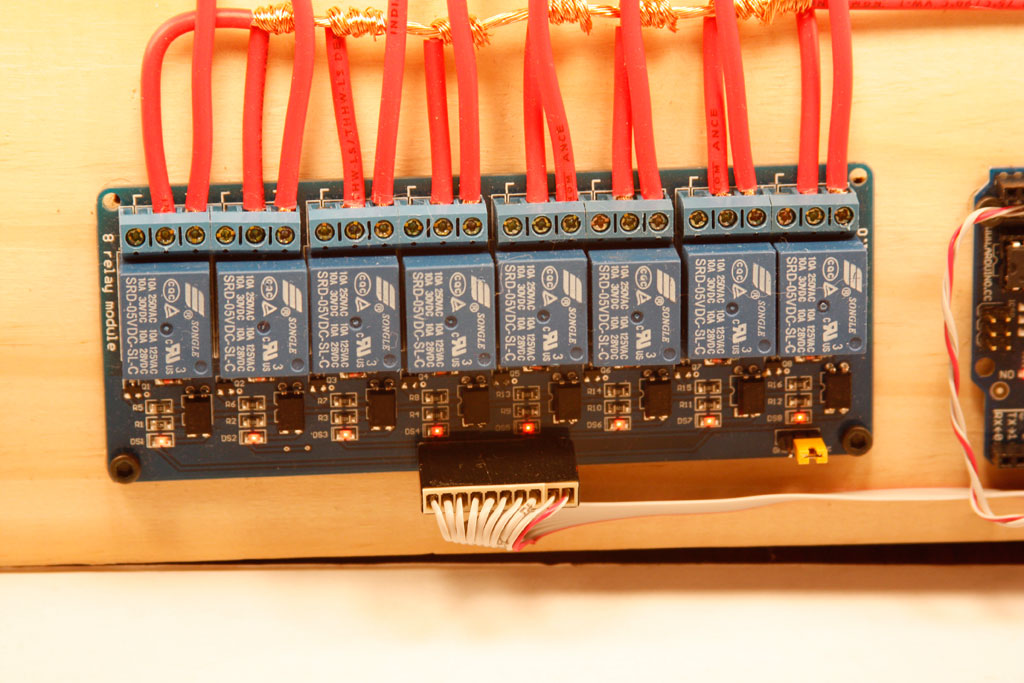
Primero conseguí un control de relays para 8 canales. Este lo compré en BuyInCoins.com. Costó aproximadamente $8.00 USD
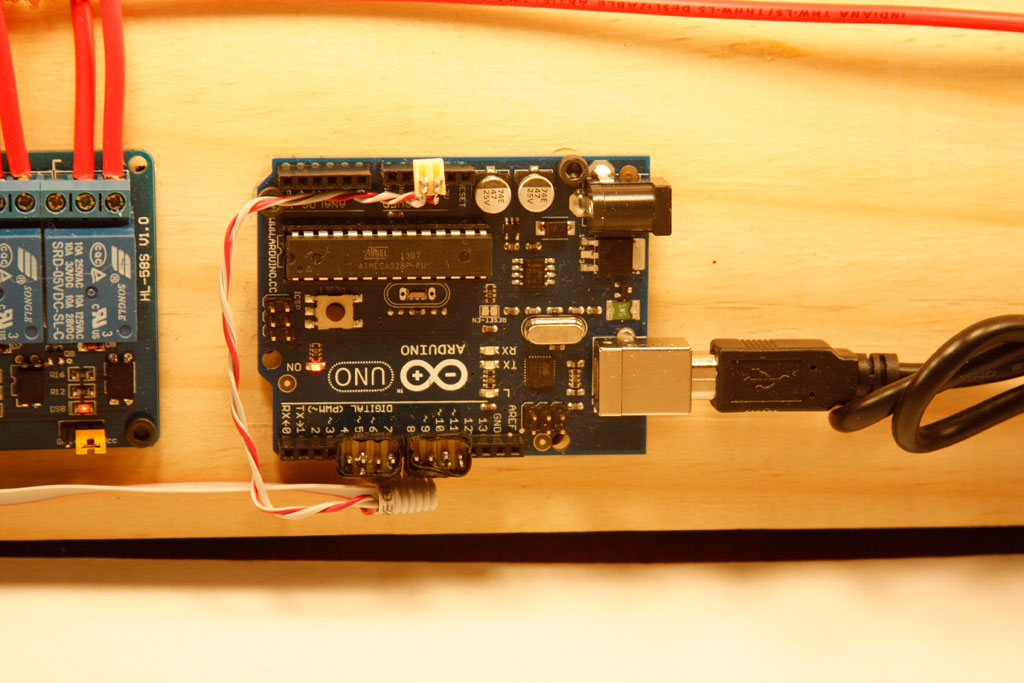
Despues compré un Arduino UNO en 330 Ohms en unos $30.00 USD. Pueden comprar la versión china en BuyInCoins.com en $13.00 USD
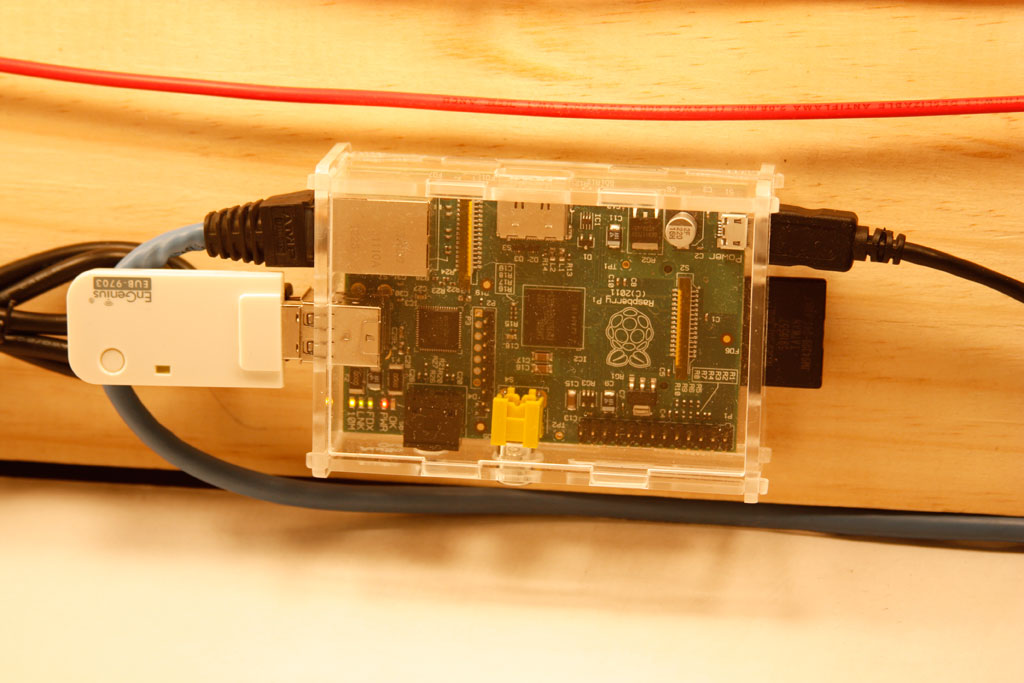
Para utilizar Asterisk use un Raspberry Pi que compré en newark por $50.00 USD.
Más una tabla, cable, tornillos, sockets y contactos por unos $35.00 USD. Agregen a esto un adaptador WiFi EnGenius en otros $30.00 y una fuente de poder con salida USB para el Raspberry en $18 USD. En total unos $171.00 USD, mas el tiempo invertido en programación.
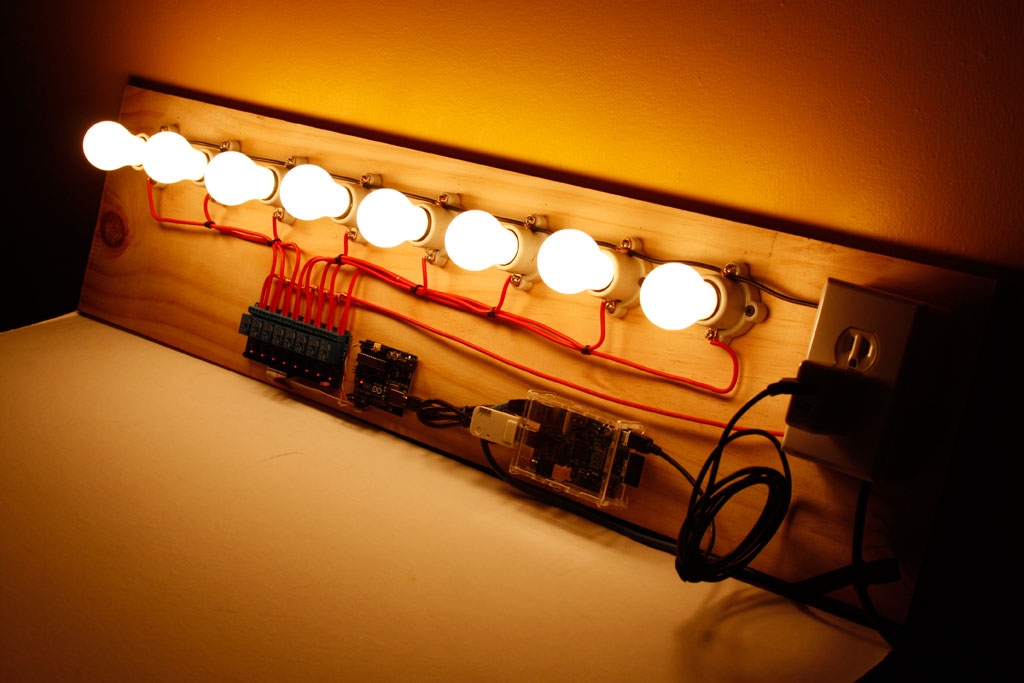
El armado de todo se ve así:

El controlador de relay’s se conecta con un cable plano al arduino uno, este a su vez se conecta con un cable USB al raspberry Pi, el cual se alimenta con una fuente USB y se monta un modem WiFi de EnGenius para su control.
Use en la Raspberry Pi una distribusión de Linux para ARM, basada en Debian Wheezy, que incorpora Asterisk 11 en www.raspberry-asterisk.org/.
Todo el código está disponible en GitHub.
Escribí el siguiente Sketch para Arduino para el control de relay’s:
/* #===================================================================# # Program => relay.ino (Arduino Sketch) version 1.0 # #===================================================================# # Autor => Fernando "El Pop" Romo (pop@cofradia.org) # # Creation date => 11/may/2013 # #-------------------------------------------------------------------# # Info => This program control relays to turn on|off electric # # circuits. # # Use Digital Pins 4 to 11 of Arduino UNO R3 and take the # # commands from the USB. # #-------------------------------------------------------------------# # This code are released under the GPL 3.0 License. Any change must # # be report to the author # # (c) 2013 - Fernando Romo # #-------------------------------------------------------------------# */ /* Init the board on Power On or serial connection */ void setup() { // initialize serial: Serial.begin(57600); // make the pins outputs: for (int i = 4; i <= 11; i++){ pinMode(i, OUTPUT); // Turn off the signals to relays digitalWrite(i, HIGH); } Serial.print("\n"); Status(); } /* Send the state of the relays (on|off) */ void Status() { Serial.print("Status"); for (int i = 4; i < 12; i++){ if (digitalRead(i) == LOW) { Serial.print("|on"); } else { Serial.print("|off"); } } Serial.print("\n"); } /* Turn off all the relays */ void All_On() { for (int i = 4; i <= 11; i++){ digitalWrite(i, LOW); } Serial.print("all|on\n"); } /* Turn off all the relays */ void All_Off() { for (int i = 4; i <= 11; i++){ digitalWrite(i, HIGH); } Serial.print("all|off\n"); } /* Turn ON a OFF relay and turn OFF and ON one*/ void Change_State (int digital_port) { if (digitalRead(digital_port+3) == HIGH) { digitalWrite((digital_port+3), LOW); Serial.print(digital_port); Serial.print("|on\n"); } else { digitalWrite((digital_port+3), HIGH); Serial.print(digital_port); Serial.print("|off\n"); } } /* Sequence to test the relays */ void Test() { Serial.print("test|on\n"); All_Off(); for (int i = 1; i <= 8; i++) { Change_State(i); delay(1000); Change_State(i); } delay(1000); for (int x = 1; x <= 2; x++) { for (int i = 1; i <= 8; i++) { Change_State(i); delay(1000); } } All_On(); delay(1000); All_Off(); Serial.print("test|off\n"); } /**************** * Main program * ****************/ void loop() // run over and over { while (Serial.available() > 0) { int sw = Serial.parseInt(); if ((Serial.read() == '\n') || (Serial.read() == '\r') ) { switch(sw) { case 0: All_Off(); break; case 9: All_On(); break; case 7828: // STAT Status(); break; case 8378: // TEST Test(); break; default: if ((sw > 0) && (sw < 9)) { Change_State(sw); } } } } } /* End of program */ |
Este programa lo subí al arduino uno por medio del IDE de Arduino (se puede bajar desde la página del proyecto para Linux, Mac y Windows).
Despues escribí un programa en Perl un poco más complicado que usa un thread dedicado ala comunicación serial con el Arduino, y el proceso principal dialoga con Asterisk por medio del AMI (Asterisk Manager Interface). Ademas de manejar un socket para usar por medio de otros programas como CGI’s para usar vía WEB.
Use las siguientes librerias de Perl que se pueden obtener en cpan.org:
-
- Device::SerialPort para el manejo de la comunicación serial con Arduino.
-
- threads pare el control de Threads.
-
- Thread::Queue para la comunicación entre threads.
Mas otras librerias comunes de Perl.
Aquí el código fuente del componente de interface entre el Arduino y Asterisk:
#!/usr/bin/perl #===================================================================# # Program => arduino_control.pl (In Perl 5.x) # #===================================================================# # Autor => Fernando "El Pop" Romo (pop@cofradia.org) # # Creation date => 2/may/2013 # #-------------------------------------------------------------------# # Info => This program is a server who make a connection with a # # asterisk server trough the TCP port 5038,take request # # from a TPC clients and dispach messages to them. # #-------------------------------------------------------------------# # This code are released under the GPL 3.0 License. Any change must # # be report to the authors # # (c) 2013 - Fernando Romo / Incuvox # #-------------------------------------------------------------------# # For the change history use "cvs log" command # #===================================================================# # Last update: # $Id: arduino_control.pl,v 1.2 2013/05/15 23:57:10 pop Exp $ # Load Modules use strict; use DBI; #use parms; use POSIX; use IO::Socket; use IO::Select; use Socket; use Fcntl; use Tie::RefHash; use Time::Local; use Time::HiRes qw(usleep); use Proc::PID::File; use File::Basename; use Data::Dumper; use threads; use Thread::Queue; use Device::SerialPort; if (defined($ARGV[0])) { if ($ARGV[0] eq '-d') { defined(my $pid = fork) or die "Can't Fork: $!"; exit if $pid; setsid or die "Can't start a new session: $!"; } } # check PID File die 'Already runnig' if Proc::PID::File->running( name => basename("$0",'.pl')); #--------------------# # Control Parameters # #--------------------# #-------------------------------------------------------------------- # [Pop] Developer Note: The Sys_Parms() load the necesary values from # the Parameter table in the DB. I left this values comment for test # and documentation purposes. #-------------------------------------------------------------------- my %Parm = (); ## Arduino server parameters $Parm{arduino}{debug} = 0; # Flag to print debug information $Parm{arduino}{port} = 4446; # port for clients $Parm{arduino}{dev} = '/dev/ttyACM0'; ## Asterisk manager parameters $Parm{asterisk}{host} = '127.0.0.1'; # IP address of * Server $Parm{asterisk}{port} = 5038; # * manager port $Parm{asterisk}{user} = 'arduino'; # * Manager user $Parm{asterisk}{pass} = 'openhardware'; # * Manager password $Parm{asterisk}{events} = 1; # Flag to request event log to * manager #-------------------------------------------------------------------- my $PBX_ID = 1; #-------------------# # Working Variables # #-------------------# my $VERSION = q{$Id: arduino_control.pl,v 1.2 2013/05/15 23:57:10 pop Exp $}; $VERSION =~ s/\$|Id:\s//g; my $HELP = "$VERSION\n\nCommands:\n\n"; # Timers Info my $Start_Time = time(); my $Reload_Time = 0; # Socket handlers my $asterisk_handler; my $asterisk_select; my $asterisk_client; # signal traps $SIG{PIPE} = 'IGNORE'; $SIG{INT} = $SIG{TERM} = $SIG{HUP} = 'Terminate'; #Load_Parameters(); # Queues to pass data between Threads my $Command_Queue = Thread::Queue->new; my $Response_Queue = Thread::Queue->new; my $tid = 0; # Open Socket connection to accept clients requests my $server = IO::Socket::INET->new(LocalPort => $Parm{arduino}{port}, Listen => 100, ReuseAddr => 1 ) or die "Can't make server socket: $@\n"; Nonblock($server); my $select = IO::Select->new($server); # begin with empty buffers my %inbuffer = (); my %outbuffer = (); my %ready = (); my %sessions = (); my %who = (); tie %ready, 'Tie::RefHash'; my $event_str = q{}; my $XML_msg = q{}; # Flags to connect to Asterisk my $manager_connect_time = 0; my $manager_connect_flag = 1; #---------------------------------------------------------------------------------------------- # [Developer Note]: the process of each client request is declared in the %Client_Handler # Hash and use references for speed operations in the event detection cycle. #---------------------------------------------------------------------------------------------- my %Client_Handler = ( #---------------------------------------------------------------------------------------------------------------- # relay: [relay number] #---------------------------------------------------------------------------------------------------------------- "relay" => sub { my $client = shift; my $control = shift; if (@{$control} < 1) { $outbuffer{$client} = "Missing relay number\n"; } else { if ($control->[1] =~ /\d+/) { $Command_Queue->enqueue('relay|' . $control->[1]); } else { $outbuffer{$client} = "Invalid relay number (must be digits)\n"; } # End if ($control->[1] =~ /\d+/) } # End if (@{$control} < 0) }, #---------------------------------------------------------------------------------------------------------------- # HELP #---------------------------------------------------------------------------------------------------------------- "help" => sub { my $client = shift; $outbuffer{$client} = $HELP; }, #---------------------------------------------------------------------------------------------------------------- # PARM: List Process parameters #---------------------------------------------------------------------------------------------------------------- "parm" => sub { my $client = shift; my $control = shift; if (@{$control} < 2) { $outbuffer{$client} = ''; foreach my $category (sort keys %Parm) { $outbuffer{$client} .= "$category\n"; foreach my $keyword (sort keys %{$Parm{$category}}) { $outbuffer{$client} .= " $keyword => $Parm{$category}{$keyword}\n"; } } } }, #---------------------------------------------------------------------------------------------------------------- # QUIT or EXIT: terminate client session #---------------------------------------------------------------------------------------------------------------- "quit" => sub { my $client = shift; delete $inbuffer{$client}; delete $outbuffer{$client}; delete $ready{$client}; delete $sessions{$client}; delete $who{$client}; $select->remove($client); close($client); }, #---------------------------------------------------------------------------------------------------------------- # STATUS #---------------------------------------------------------------------------------------------------------------- "status" => sub { my $client = shift; $Command_Queue->enqueue('relay|7828'); }, #---------------------------------------------------------------------------------------------------------------- # UPTIME: elapsed time of the running service #---------------------------------------------------------------------------------------------------------------- "uptime" => sub { my $client = shift; $outbuffer{$client} = Convert_To_Time(time() - $Start_Time) . "\n"; }, #---------------------------------------------------------------------------------------------------------------- # TEST #---------------------------------------------------------------------------------------------------------------- "test" => sub { my $client = shift; $Command_Queue->enqueue('relay|8378'); }, #---------------------------------------------------------------------------------------------------------------- # TIME: current system time #---------------------------------------------------------------------------------------------------------------- "time" => sub { my $client = shift; $outbuffer{$client} = Current_Time() . "\n"; }, #---------------------------------------------------------------------------------------------------------------- # VERSION: Bring information about this program #---------------------------------------------------------------------------------------------------------------- "version" => sub { my $client = shift; $outbuffer{$client} = "$VERSION\n"; }, #---------------------------------------------------------------------------------------------------------------- # WHO: List agents and extensions active for control #---------------------------------------------------------------------------------------------------------------- "who" => sub { my $client = shift; $outbuffer{$client} = "\nConnections " . (scalar keys %sessions) . "\n"; foreach my $online (sort keys %who) { my ($port, $address) = unpack_sockaddr_in(getpeername($who{$online})); my $ip_address = inet_ntoa($address); $outbuffer{$client} .= "$ip_address\:$port\n"; } }, ); #------------------------------------------------------------------# # [Pop] Developer Note: I declare the "exit" command Out of the # # initial %Client_Handler Hash declaration to avoid perl compiler # # errors because i try to invoque a non declare hash into the # # same hash :P # # # # The trick is receive the "exit" command and call the same # # rutine of the "quit" event. # #------------------------------------------------------------------# $Client_Handler{exit} = (sub { my $client = shift; $Client_Handler{quit}->($client); }); $Client_Handler{'?'} = (sub { my $client = shift; $Client_Handler{help}->($client); }); foreach my $command (sort keys %Client_Handler) { $HELP .= " $command\n"; } #--------------------------------------------------------------------------------------# # [Developer Note]: the process of each packet comming from the asteris manager (AMI), # # is declared in the %Event_Handler Hash and use references for # # speed operations in the event detection cycle. # #--------------------------------------------------------------------------------------# my %Event_Handler = ( #----------------------------- # Event: UserEvent # Privilege: user,all # UserEvent: RELAY|1 # Action: UserEvent #----------------------------- "UserEvent" => sub { my $packet_content_ref = shift; my ($userevent) = $packet_content_ref =~ /UserEvent\:\s(.*?)\n/isx; #---------------------------------------------------------------------------------------------------------------- # UserEvent(RELAY|number) #---------------------------------------------------------------------------------------------------------------- my @Response = split(/_/, $userevent); if ($Response[0] eq 'RELAY') { $Command_Queue->enqueue('relay|' . $Response[1]); } }, #----------------------- # Event: Shutdown # Privilege: system,all # Shutdown: Cleanly # Restart: False #----------------------- "Shutdown" => sub { my $packet_content_ref = shift; # Terminate(); # if asterisk end then stop pms server }, ); #---------------------------------------------------------# # Function: Terminate() # #---------------------------------------------------------# # Objetive: catch the {INT} signal and close connection # # to sockets and terminate program. # # Params: none # # Usage: # # $SIG{INT} = 'Terminate'; # #---------------------------------------------------------# sub Terminate { #$thread_die = 1; # Flag to indicate to the child process die $Command_Queue->enqueue('stop'); my $client; # Clean up connections foreach $client (keys %sessions) { $select->remove($client); close($client); } close($server); # destroy socket handler close($asterisk_handler); # destroy asterisk manager conection $tid->join() if ($tid); exit(0); # Exit without error } #-----------------------------------------------# # Function: Nonblock([TCP socket handler]) # #-----------------------------------------------# # Objetive: puts socket into nonblocking mode # # Params: [TCP Socket Handler] # # Usage: # # Nonblock($socket); # #-----------------------------------------------# sub Nonblock { my $socket = shift; my $flags; $flags = fcntl($socket, F_GETFL, 0) or die "Can't get flags for socket: $!\n"; fcntl($socket, F_SETFL, $flags | O_NONBLOCK) or die "Can't make socket nonblocking: $!\n"; } #-----------------------------------------------# # Function: Manager_Login # #-----------------------------------------------# # Objetive: Send Login Action to Asterisk API # # Params: none # # Usage: # # Manager_Login(); # #-----------------------------------------------# sub Manager_Login { my $command = "Action: Login\r\n"; $command .= "Username: $Parm{asterisk}{user}\r\n"; $command .= "Secret: $Parm{asterisk}{pass}\r\n"; $command .= "Events: "; if ($Parm{asterisk}{events}) { $command .= 'on'; } else { $command .= 'off'; } $command .= "\r\n\r\n"; print "---------------\n$command\n" if ($Parm{arduino}{debug}); Send_To_Asterisk(\$command); } #--------------------------------------------------# # Function: Connect_To_Asterisk() # #--------------------------------------------------# # Objetive: connect program with asterisk manager # # Params: None # # Usage: # # Connect_To_Asterisk(); # #--------------------------------------------------# sub Connect_To_Asterisk { $asterisk_handler = new IO::Socket::INET->new( PeerAddr => $Parm{asterisk}{host}, PeerPort => $Parm{asterisk}{port}, Proto => "tcp", ReuseAddr => 1, Type => SOCK_STREAM ); if ($asterisk_handler) { $asterisk_handler->autoflush(1); Nonblock($asterisk_handler); $select->add($asterisk_handler); $manager_connect_time = time; return 0; } else { return 1; } } #--------------------------------------------------------# # Function: Send_To_Asterisk([message]) # #--------------------------------------------------------# # Objetive: Send message to Asterik manager # # Params: message, socket_handler # # Usage: # # Send_To_Asterisk($message,$socket) # #--------------------------------------------------------# sub Send_To_Asterisk { my $command_ref = shift; unless ($command_ref eq "" && $manager_connect_flag == 1) { #--------------------------------------------------------------------------------# # Developer Note: in some cases, the API Manager sufer of a requets override and # # is necesary put a little time wait between requests. # #--------------------------------------------------------------------------------# # usleep 200_000; # if the socket exists send data, if not, turn on reconnection flag # if (defined(getpeername($asterisk_handler))) { unless($asterisk_handler eq "") { my $rv; eval { $rv = $asterisk_handler->send($command_ref, 0) }; unless (defined $rv) { # if send fails, turn on reconnection flag $manager_connect_flag = 1; } } else { $manager_connect_flag = 1; } } } #-------------------------------------------------------# # Fuction: Trim([var|array]) # #-------------------------------------------------------# # Objetive: Take out blank spaces in the rigth and left # # of the field # # Params: one string or array # # Usage: # # $sample = Trim(" vs "); # # $sample = Trim($foo); # # @sample = Trim(@data); # #-------------------------------------------------------# sub Trim { my @out = @_; for (@out) { s/^\s+//g; s/\s+$//g; } return wantarray ? @out : $out[0]; } #---------------------------------------------------# # Function: Dial([phone number],[agent],[campaign], # # [Warehouse_id],[call_id]) # #---------------------------------------------------# # Objetive: originate a phone call via the asterisk # # # # Params: phone number # # Usage: # # Dial("85909000","1001") # #---------------------------------------------------# sub Dial { my ($tcp_client, $class, $number, $wid, $call_id) = @_; my $command = "Action: Originate\r\n"; # $command .= "Channel: Local/$number\@default/n\r\n"; $command .= "Channel: $Parm{asterisk}{trunk}/$number\r\n"; $command .= "Context: default\r\n"; $command .= "Priority: 1\r\n"; $command .= "Async: true\r\n"; $command .= "Timeout: 30000\r\n"; $command .= "Variable: TIMEOUT(absolute)=$Parm{arduino}{absolute_timeout}\r\n"; $command .= "Variable: CDR(dnis)=$number\r\n"; $command .= "Variable: CDR(call_type)=2\r\n"; $command .= "Variable: CDR(origin)=4\r\n"; $command .= "Variable: CDR(pbx)=$PBX_ID\r\n"; $command .= "Callerid: $number\r\n"; my ($tcp_client_hex_part) = $tcp_client =~ /\((.*?)\)/; $command .= "ActionID: C\|$tcp_client_hex_part\|$call_id\|$wid\|$number"; $command .= "\r\n\r\n"; Send_To_Asterisk(\$command); } #----------------------------------------------------# # Function: User_Event([Message]) # #----------------------------------------------------# # Objetive: Send a User Event to communicate state # # with other process # # Params: Agent, mode # # Usage: # # User_Event($msg); # #----------------------------------------------------# sub User_Event { my ($msg) = @_; my $command = "Action: UserEvent\r\n"; $command .= "UserEvent: $msg\r\n\r\n"; Send_To_Asterisk(\$command); } #---------------------------------------------------------# # Fuction: Pad([string],[Width],[fill_char],[Direction]) # #---------------------------------------------------------# # Objetive: Fill with character selected one string in # # the right or left # # Params: string, Max_Width, fill_char, # # Direction (0 = left, 1 = rigth) # # Usage: # # Pad($month,2,'0',0) # #---------------------------------------------------------# sub Pad { my ($string, $lmax, $char, $dir) = @_; my $l = length $string; if ($l > $lmax) { $string = substr($string, 0, $lmax); } else { if ($dir) { $string = $string . ($char x ($lmax - $l)); } else { $string = ($char x ($lmax - $l)) . $string; } } return $string; } #===========================================================# # Convert_To_Time # #-----------------------------------------------------------# # Fuction to convert elapsed time in seconds to a friendly # # format like hhh:mm:ss # # # # Arguments: # # a integer number that mean seconds # # Sample: # # $seconds = 11145; # # print "call elapsed time = "; # # print Convert_To_Time($seconds); # # Result: # # call elapsed time = 3:05'45 # #===========================================================# sub Convert_To_Time { my $time=$_[0]; my $days = int($time / 86400); my $aux = $time % 86400; my $hours = int($aux / 3600); $aux = $aux % 3600; my $minutes = int($aux / 60); my $seconds = $time % 60; my $result = ""; if ($days == 1) { $result = "$days day "; } elsif ($days > 1) { $result = "$days days "; } $result .= $hours.":".Pad($minutes,2,'0',0)."'".Pad($seconds,2,'0',0); return $result; } #-------------------------------------------------# # Function: Current_Time # #-------------------------------------------------# # Objetive: Return current formated date and time # # Params: none # # Usage: # # $date = CurrentTime_(); # #-------------------------------------------------# sub Current_Time { my ($second, $minute, $hour, $day, $month, $year) = (localtime(time()))[0,1,2,3,4,5]; $month++; $year += 1900; return "$year-" . Pad($month,2,'0',0) . '-' .Pad($day,2,'0',0) .' ' . Pad($hour,2,'0',0) . ':' . Pad($minute,2,'0',0).':'.Pad($second,2,'0',0); } #--------------------------------------------------------# # Function: Arduino_Handler() [Thread] # #--------------------------------------------------------# # Objetive: Process serial comunication with Arduino USB # # Params: file device # # Usage: # # $tid = threads->create(\&Arduino_Handler,$dev); # #--------------------------------------------------------# sub Arduino_Handler { my $arduino_dev = shift; my $port = undef; my $Serial_Connection_Flag = 1; #----------------------------------------------------------------------------------- # [Pop] Developer Note: This is tricky part of declare a sub into a sub to invoque # on the thread start and on reload :P #----------------------------------------------------------------------------------- # _Connect_Arduino() - Star serial communication with Arduino using USB #----------------------------------------------------------------------------------- local *_Connect_Arduino = sub { if (( -e $arduino_dev) && ($Serial_Connection_Flag == 1)) { $Serial_Connection_Flag = 0; eval { $port = Device::SerialPort->new("$arduino_dev") }; unless ($port eq "") { $port->baudrate(57600); # you may change this value $port->databits(8); # but not this and the two following $port->parity("none"); $port->stopbits(1); $port->handshake("none"); $port->read_char_time(0); $port->read_const_time(20); } else { $Serial_Connection_Flag = 1; } } else { $Serial_Connection_Flag = 1; } }; #-------------------------------------------------------------------------- # __Send_To_Arduino() - Send Info to Arduino #-------------------------------------------------------------------------- local *_Send_To_Arduino = sub { my ($relay) = shift; my $count = 0; unless ($port eq "") { eval { $count = $port->write("$relay\n") }; unless($count) { $Serial_Connection_Flag = 1; } } else { $Serial_Connection_Flag = 1; } }; local *_Read_From_Arduino = sub { my $rx = ''; eval { $rx = $port->lookfor() }; if ($port eq "") { $Serial_Connection_Flag = 1; } else { return $rx;; } }; #-------------------# # Main thread cycle # #-------------------# while (1) { if ($Serial_Connection_Flag) { _Connect_Arduino(); } my $command = $Command_Queue->dequeue_nb; if ($command) { if ($command =~ /\|/) { my ($option,$value) = split(/\|/,$command); if ($option eq 'relay') { _Send_To_Arduino($value); } } elsif ($command eq 'stop') { $port->close; return; } } my $rx = _Read_From_Arduino(); if ($rx) { $Response_Queue->enqueue($rx); } } # End Main thread cycle } #---------------------------------------------------------# # Function: Handle_Clients([Client TCP handler]) # #---------------------------------------------------------# # Objetive: Take the requests of client programs and # # interface with Asterisk manager # # Params: [client TCP handler] # # Usage: # # Handle_Clients($client); # #---------------------------------------------------------# sub Handle_Clients { # requests are in $ready{$client} # send output to $outbuffer{$client} my $client = shift; my $request; foreach $request (@{$ready{$client}}) { $request =~ s/\r|\n//g; if ($request) { my @control = split (/\s+/, Trim($request)); if (exists($Client_Handler{$control[0]})) { $Client_Handler{$control[0]}->($client,\@control); } else { $outbuffer{$client} = "Invalid command\n"; } } } delete $ready{$client}; } #---------------------------------------------------------# # Function: Handle_Events([Asterisk TCP handler]) # #---------------------------------------------------------# # Objetive: Take the requests of Asterisk and manipulate # # the asterisk Manager events. # # Params: [Asterisk TCP handler] # # Usage: # # Handle_Events($asterisk_handler); # #---------------------------------------------------------# sub Handle_Events { # requests are in $ready{$client} # send output to $outbuffer{$client} my $client = shift; my $request; my @packet = (); foreach $request (@{$ready{$client}}) { $event_str .= $request if ($request); } if ($event_str =~ /\r\n\r\n/) { # put each packet in separate area @packet = $event_str =~ /(?:Action|Event|Message|Response).*?\r\n\r\n/isxg; # process each individual packet foreach my $packet_content (@packet) { $packet_content =~ s/\r//g; # Analyze each packet header and process according my ($event) = $packet_content =~ /^Event\:\s(.*?)\n/isx; if (exists($Event_Handler{$event})) { $Event_Handler{$event}->(\$packet_content); } } # if exists a remainder incomplet event, keep it to the next round my $last_pos = rindex($event_str,"\r\n\r\n"); $last_pos = $last_pos + 4; my $len = length($event_str); if ($len > $last_pos) { $event_str = substr($event_str,$last_pos); } else { $event_str = ""; } } delete $ready{$client}; } #---------------------------------------------------------# # Function: Clean_Connection([TCP handler]) # #---------------------------------------------------------# # Objetive: Close client TCP connection # # Params: [TCP handler] # # Usage: # # Clean_Connection($client_handler); # #---------------------------------------------------------# sub Clean_Connection { my $client_session = shift; # Delete working buffers delete $inbuffer{$client_session}; delete $outbuffer{$client_session}; delete $ready{$client_session}; delete $sessions{$client_session}; delete $who{$client_session}; # Check if the connection to Asterisk Die and turn the reconnection Flag if ($client_session eq $asterisk_handler) { $manager_connect_flag =1; } $select->remove($client_session); close($client_session); } #======================# # Main block # #======================# # $/="\0"; # Launch Configuration Thread for Arduino control $tid = threads->create(\&Arduino_Handler,$Parm{arduino}{dev}); # Main loop while (1) { my $client; my $rv; my $data; if ($manager_connect_flag) { $manager_connect_flag = Connect_To_Asterisk(); unless ($manager_connect_flag) { Manager_Login(); } } # check for new information on the connections we have. # anything to read or accept? foreach $client ($select->can_read(1)) { if ($client == $server) { # accept a new connection $client = $server->accept(); $select->add($client); Nonblock($client); $sessions{$client} = 1; $who{$client} = $client; $outbuffer{$client} = "$VERSION (? for help)\n"; } else { # read data $data = q{}; eval { $rv = $client->recv($data, POSIX::BUFSIZ, 0) }; unless (defined($rv) && length $data) { # This would be the end of file, so close the client Clean_Connection($client); next; } $data =~ s/\0/\r\n/g; $inbuffer{$client} .= $data; # test whether the data in the buffer or the data we # just read means there is a complete request waiting # to be fulfilled. If there is, set $ready{$client} # to the requests waiting to be fulfilled. while ($inbuffer{$client} =~ s/(.*\r\n)//) { push( @{$ready{$client}}, $1 ); } } } # Read if exist response from Arduino my $response = $Response_Queue->dequeue_nb; if ($response) { foreach $client ($select->can_write(1)) { $outbuffer{$client} = $response . "\n"; } } # Any complete requests to process? foreach $client (keys %ready) { if ($client eq $asterisk_handler) { Handle_Events($client); } else { Handle_Clients($client); } } # Buffers to flush? foreach $client ($select->can_write(1)) { # Skip this client if we have nothing to say next unless exists $outbuffer{$client}; # Check if the socket exists before send ## if (defined(getpeername($client))) { unless($client eq "") { eval { $rv = $client->send($outbuffer{$client}, 0) }; unless (defined $rv) { # Whine, but move on. warn "I was told I could write, but I can't.\n"; next; } if ($rv == length $outbuffer{$client} || $! == POSIX::EWOULDBLOCK) { substr($outbuffer{$client}, 0, $rv) = q{}; delete $outbuffer{$client} unless length $outbuffer{$client}; } else { Clean_Connection($client); next; } } else { Clean_Connection($client); next; } } # Out of band data? foreach $client ($select->has_exception(0)) { # arg is timeout # Deal with out-of-band data here, if you want to. } } # End of main loop #------------- End of Program ---------- |
Este programa lo arranco como servicio en Linux. usando este script en /etc/init.d/arduino
#!/bin/bash ### BEGIN INIT INFO # Provides: arduino # Required-Start: freepbx # Required-Stop: freepbx # Default-Start: 2 3 4 5 # Default-Stop: 0 1 6 # Short-Description: Start Arduino Asterisk Control # Description: Start Arduino Asterisk Control ### END INIT INFO # # chkconfig: 35 99 99 # description: Arduino Server # processname: arduino_control.pl # source function library . /lib/lsb/init-functions #. /etc/rc.d/init.d/functions DAEMON="/root/arduino/arduino_control.pl >> /dev/null 2>&1" OPTIONS=-d RETVAL=0 case "$1" in start) echo -n "Starting Arduino server: " daemon $DAEMON $OPTIONS RETVAL=$? echo [ $RETVAL -eq 0 ] && touch /var/lock/arduino_control.pl ;; stop) echo -n "Shutting down Arduino server: " killproc arduino_control.pl RETVAL=$? echo [ $RETVAL -eq 0 ] && rm -f /var/lock/arduino_control.pl ;; restart) $0 stop $0 start RETVAL=$? ;; reload) echo -n "Reloading Arduino server: " killproc arduino_control.pl -HUP RETVAL=$? echo ;; status) status arduino_control.pl RETVAL=$? ;; *) echo "Usage: arduino_control {start|stop|status|restart|reload}" exit 1 esac exit $RETVAL |
En Asterisk hay que poner lo siguiente en el archivo /etc/asterisk/manager.conf, si usan el freepbx que viene incluido en la disto lo ponen en /etc/astrisk/manager_custom.conf:
[arduino] secret=openhardware writetimeout = 10000 ;read = system,call,log,verbose,agent,user,config,dtmf,reporting,cdr,dialplan eventfilter=!Event: RTCPSent eventfilter=!Event: RTCPReceived read = system,call,log,agent,user,config,dtmf,reporting,cdr,dialplan write = system,call,agent,user,config,command,reporting,originate |
Para probar, ponemos en el archivo de /etc/asterisk/extensions.ael esto:
context from-internal {
888 => {
goto ivr,s,1;
};
777 => {
Answer;
MusicOnHold();
Hangup;
};
8378 => {
Answer;
Playback(beep);
UserEvent(RELAY_8378,);
Hangup;
};
666 => {
Answer;
Playback(beep);
UserEvent(RELAY_1,);
wait(1);
UserEvent(RELAY_1,);
UserEvent(RELAY_2,);
wait(1);
UserEvent(RELAY_2,);
UserEvent(RELAY_3,);
wait(1);
UserEvent(RELAY_3,);
UserEvent(RELAY_4,);
wait(1);
UserEvent(RELAY_4,);
UserEvent(RELAY_5,);
wait(1);
UserEvent(RELAY_5,);
UserEvent(RELAY_6,);
wait(1);
UserEvent(RELAY_6,);
UserEvent(RELAY_7,);
wait(1);
UserEvent(RELAY_7,);
UserEvent(RELAY_8,);
wait(1);
UserEvent(RELAY_8,);
Playback(beep);
Hangup;
};
}
context ivr {
s => {
Answer;
Background(silence/9);
pregunta:
Set(TIMEOUT(response)=5);
Set(TIMEOUT(digit)=1);
WaitExten();
goto pregunta;
};
_X => {
UserEvent(RELAY_${EXTEN},);
goto s,pregunta;
};
t => {
goto ivr,s,pregunta;
};
i => {
goto ivr,s,pregunta;
};
} |
Si se fijan, use un llamado a la función “UserEvent” que permite mandar mensajes usando el core de Asterisk, estos los proceso como eventos de AMI en el programa “arduino_control.pl” y así puedo disparar eventos desde el plan de marcación de Asterisk.
UserEvent(RELAY_X,); |
Donde “X” es el número de relay que deseo activar. dejo reservado el número “8378” (TEST) para probar los relay’s. Uso el 7828 (STAT) para pedir el estatus de los relay’s.
Tambien se puede actuvar los eventos por medio de la interface por socket usando el puerto 4446 por TCP. por ejemplo usando Telnet:
$ telnet 192.168.1.89 4446 Trying 192.168.1.89... Connected to raspbx.lan. Escape character is '^]'. arduino_control.pl v1.0 (? for help) relay 8 8|on relay 8 8|off status Status|off|off|off|off|off|off|off|off |
Para ver mas opciones le dan “help”.
Y suscriben una extensión SIP al Asterisk del Raspberry Pi.
Espero se diviertan jugando con este tipo de proyectos 🙂
Autor: Fernando “El Pop” Romo (pop at cofradia.org), twitter @El_Pop
Felicidades, excelente proyecto y mejor aun por compartirlo, interesante la parte de los relays, arduino con rapsberry que buena mancuerna. 🙂
Hace algunos años intenté lo mismo, aunque con hardware ya hecho, como es la tecnología X10, hay varios appliances para focos, contactos electricos, sensores, alarmas, etc., cada dispositivo tiene dos ID hexadecimales y desde una interfaz serial que conecta a la energía eléctrica, envías desde linux comandos de encendido, apagado al id hexadecimal, también puedes recibir status del dispositivo por ejemplo de alguna alarma o sensor.
Lo interesante de esto es que ahora ya hay sistemas de reconocimiento de voz avanzados en español como vestec por ejemplo con cuál integrarlos, en ese tiempo lo hice con sphinx pero era muy rudimentario.
Creo que la domótica apenas empieza. 🙂